Visual odometry is the problem of determining camera position and orientation from a video of the trajectory. One of the most popular pipelines is ORB-SLAM, pictured below.
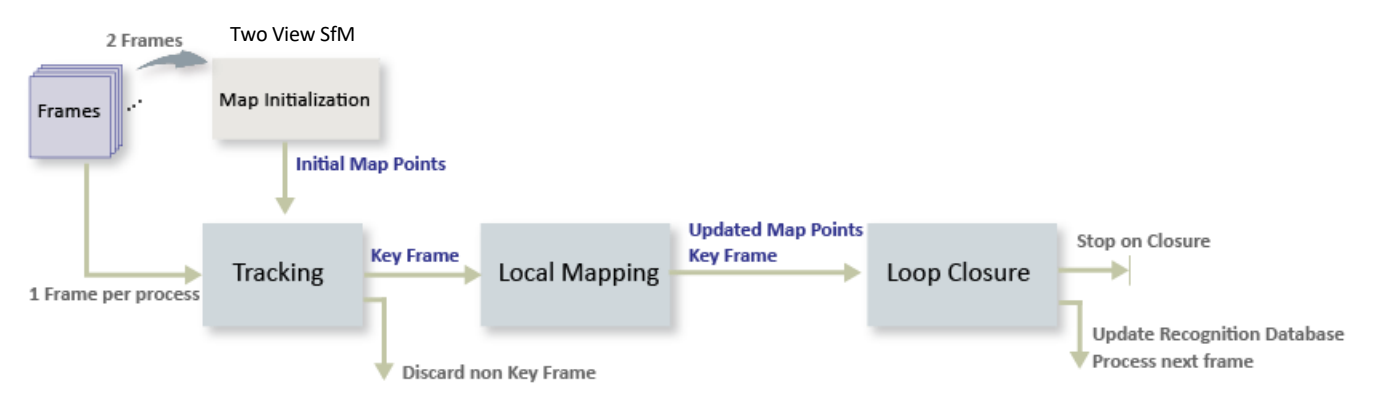
The structure combines both engineering and theoretical methods, both generally, visual odometry algorithms perform the following steps:
- Process input images and extract features.
- Construct optical flow field or correspondences.
- Remove outliers (via 🎲 RANSAC), then estimate camera motion from the optical flow.