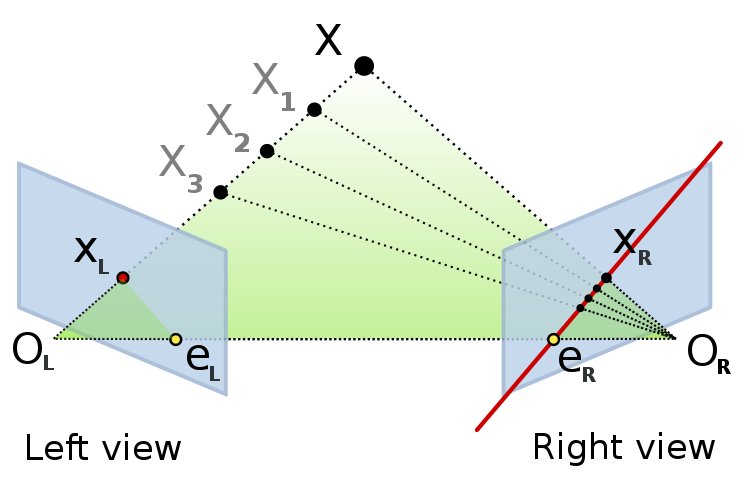
Epipolar geometry describes the relationship between two cameras in stereo vision (like the arrangement below).
Epipolar Constraint
In this setup, the green triangle forms a plane called the epipolar plane. Let
Since these three vectors lie on the same plane, we get the epipolar constraint
Geometrically, this says that the vector orthogonal to
Epipolar Line
The intersection of the epipolar plane with the image plane gives us the epipolar line. To find the equation of this line, we can rearrange the epipolar constraint for each view.
For the left image, we have
where the left epipolar line is
For the right image, we have
where the right epipolar line is
Epipole
The intersection of all epipolar lines (from multiple
Geometrically, varying