Camera intrinsics are inherent characteristics of the 📷 Camera Models (usually the lens) that relate points in the 3D camera coordinate system to its projected location on the image plane. Specifically, the intrinsics are defined by the focal length and image center . Knowing these values allows us to transform between the camera and image coordinate systems.
Usually, the intrinsics are summarized as a matrix
which is used in projective linear algebra equations. is usually known and computed via calibration (as given along with the camera), but it’s also possible to compute directly from a picture.
Given a picture (and specifically vanishing points in the image plane), we can find .
For two rays and , we can find the angle between them
For most rays, we don’t know since we would need to measure it in the world. However, if we use orthogonal vanishing points, we know is a right angle. Thus, if we have two vanishing points,
Let be
If we find , we can directly recover , , and .
Substituting into our equation above, we have
and if we expand it out, we can write this as a homogeneous equation
However, the quantities for are dependent,
We can set , so . Our system is now
If we have three orthogonal vanishing points in the world that aren’t at infinity in the image, we can form a system of equations, one equation per pair, in the form above. Note that if we use a vanishing point at infinity, then we can’t solve for , so we cannot recover .
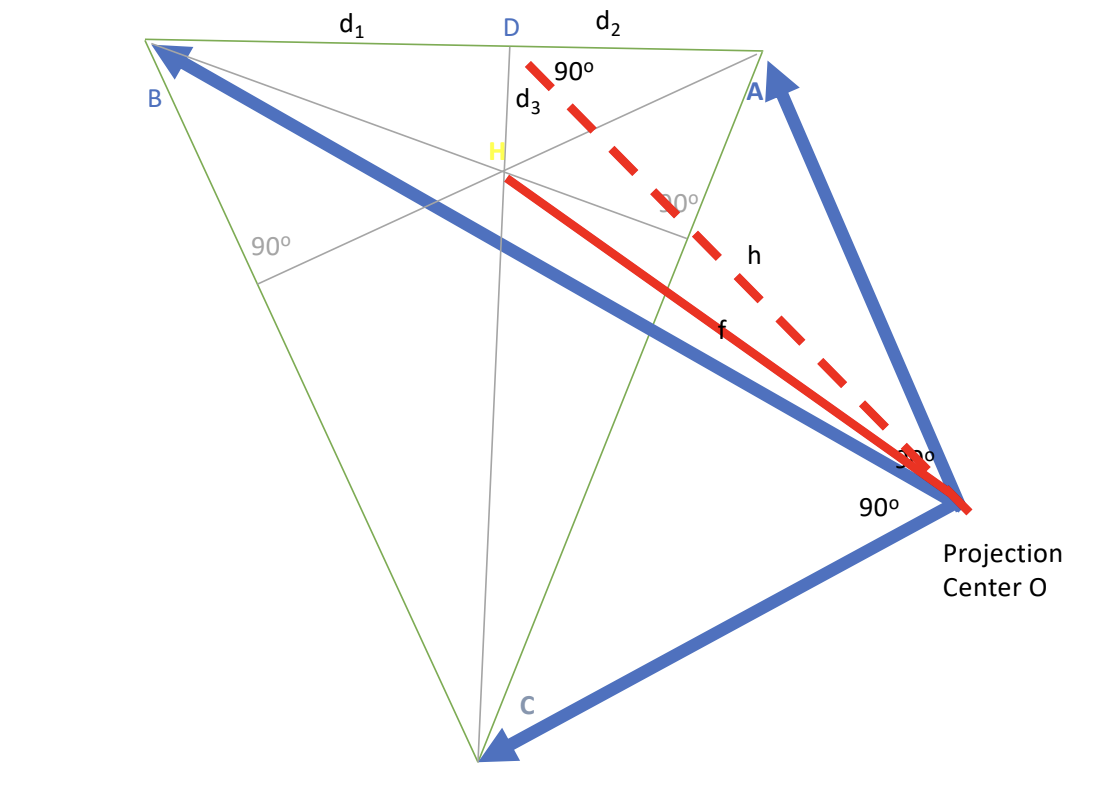
Let , , and be our vanishing points in the image plane and be the projection center.
If and is the orthocenter of , We know the optical axis must be perpendicular to the image plane, so is exactly our optical axis. Moreover, the intersection is the image center, so is at .
Lastly, is the length of , and we can compute it. Since is a right triangle (right angle ), we can use the right triangle altitude property, . We also have Pythagoras with , giving us . Combining, we get